 软件星级:4分
软件星级:4分
标签: 3D建模
3DF Zephyr Lite破解版是一款优秀的3D建模软件。它可以将拍摄的图像转换为3D模型,通常用于形成复杂的地形,便于地理研究。它支持的3D格式较多,而且不需要编码就能建立3D模型。
3DF Zephyr允许您自动从照片重建3D模型。该过程完全自动化,不需要编码目标,手动编辑或特殊设备。3DF Zephyr建立在我们专有的尖端重建技术之上。
3DF Zephyr具有用户友好的界面,可以导出许多常见的3D格式,甚至无需外部工具即可生成无损视频。此外,3DF Zephyr具有许多先进功能,例如,您可以编辑模型,创建真正的正射影像,数字高程模型(DTM),管理激光扫描数据并计算面积,体积,角度,等高线等等。更多。
在3Dflow中,我们努力构建核心技术和用户界面。所获得的解决方案很可能是市场上可获得的最准确,全自动,最佳设计的多视图立体算法。
1、适用于任何相机和无人机
2、原生激光扫描支持
3、导出点云,网格和纹理
4、DEM,配置文件,真正的正射影像和正交镶嵌
5、CAD绘图,轮廓线生成,地理配准
6、用于屏蔽,选择和编辑的专业工具
7、点云和网格过滤器
8、测量(距离,面积,体积,角度)
9、以所有最常见的文件格式导入/导出
要创建新项目,只需单击“工作流”>“新建项目”(1)。将出现项目向导(3)屏幕,该屏幕将指导您完成导入图片的过程。

对于标准工作流程,您只需单击“下一步”按钮,然后继续在软件中添加照片。
但是,在该向导中有两个子菜单,分别是Imports(3)和Additionaloptions(4)。
在Imports菜单中,您有两个选择:
导入控制点约束:3DFZephyr不需要任何预校准文件;但是,如果您使用自己的设备创建了校准文件,则可以通过选择此选项加载校准文件。通过单击“下一步”按钮,您将找到另一个子菜单,您可以在其中选择是否:
-手动输入每个内部和外部参数(对于每个图像);
-指定位置和欧拉角;
-使用文本文件导入内部和外部参数
导入摄像机位置约束:作为上一个选项,此选项允许您在3DFZephyr中导入摄像机位置(通过加载txt文件)并使用它们来约束3D重建;该条目的实际使用的标准示例由无人机或UAV系统记录所拍摄的照片表示,其将拍摄的GPS坐标记录到Exif数据中。
在附加选项子菜单(4)中,您可以指示软件执行四个3D重建阶段中的每一个,而不会在一个阶段和下一阶段之间停止;当您没有足够的时间来监控3D重建的每个阶段时,此工具非常有用。这种技术称为批处理,仅建议高级用户使用,因为它代表了3DFZephyr中最高级别的自动化。
在附加选项(4)中,在线检查预计算摄像机校准选项允许Zephyr连接到我们的3DFZephyr在线数据库:软件将能够自动下载预校准参数,从而减少结构从运动阶段的持续时间。
在上一个子菜单中,您还可以加载与照片相关的蒙版,如果这些蒙版以前是使用3DFMasquerade工具生成的。单击“下一步”后,将出现“屏蔽”页面(参见上图),它将指定是否已将面具正确加载到3DFZephyr中(对于每个导入的蒙版,绿色“确定”应显示在图片名称附近)。

通过在定向期间选择忽略蒙版选项,3DFZephyr将仅在生成密集点云时利用蒙版;如果图像背景纹理很好,这个工具很有用,因此可以帮助相机定位的第一阶段。
下一个窗口是照片选择页面,要求用户加载图片。可以将文件拖放到窗口中或单击添加(5)以选择照片目录。从3DFZephyr3.1版开始,用户还可以添加和处理原始文件
3DFZephyr允许您通过“从视频图像导入”按钮导入图像和视频(6);此工具可以将视频分割为帧,随后将像其他任何图像一样对待。
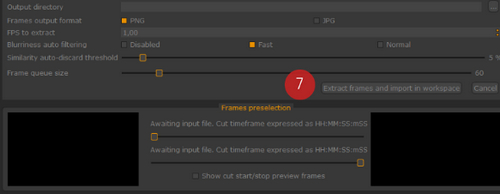
在加载窗口中,可以选择所需的文件,然后指定目标文件夹,它将保存提取的帧集。 在下面的选项中,您可以设置要提取的帧速率(FPS),每帧的模糊分析以及类似帧的识别阈值和拒绝。 此外,您可以将您不想考虑的视频数据部分剪切到帧提取中。
要开始提取,只需单击Extract frames并在工作区中导入(7)。

加载图像或视频文件并单击“下一步”按钮后,您将看到“摄像机校准”页面,您将在其中看到每个导入图像的列表以及3DF Zephyr将用于每个摄像机及其EXIF数据的校准。
通过右键单击窗口,您可以选择或取消选择所有图像,并克隆校准。
在此页面中,您可以添加新校准(8)或修改3DF Zephyr通过照片的Exif数据自动识别的校准(9)。
在“修改校准”页面中,您可以选择要更改的焦距(如果已使用不同焦距拍摄的已加载图像),然后定义校准参数。
通过从文件导入参数按钮,您可以加载使用外部应用程序创建的校准文件(例如旧的3DFLapyx或3DFZephyr嵌入式校准工具)。
提示:如果您导入了使用广角或鱼眼镜头拍摄的照片,建议激活调整切向失真参数选项(10)
校准步骤完成后,您必须通过“摄像机方向设置”页面设置3D重建的第一阶段,该页面将生成稀疏点云作为初始3D结果。
1、Zephyr无法写在硬盘上,我该怎么办?
确保没有其他软件阻止Zephyr访问文件系统。在任何情况下,您都可以从选项菜单中指定任意临时目录。
2、我如何使用开发者控制台?
请考虑此功能仅用于支持,如果使用不当,将会中断。控制台使用LUA5.3.1,但不需要外部依赖项。
3、约束和控制点之间的区别是什么?
让我们考虑一下航空测量,你可以通过无人机上的GPS系统获取坐标,也可以使用全站仪获取地面坐标。
在Zephyr中放置您的分数后,您可以选择哪些分数必须是约束,即您最有信心(准确性)的分数,以及哪些分数将被视为简单参考。
第一组将是全站仪在地面上采取的点,因为它们的准确度肯定高于无人机上GPS系统所采用的GPS坐标,代表第二组。
4、如何在执行3D重建之前避免考虑GPS数据?
只需单击工具>选项>应用程序,然后禁用“允许运动结构使用摄像机的GPS信息”选项。
操作系统:Windows 10 / 8.1 / 8/7 / Vista 64位
处理器:四核Intel或AMD CPU
内存:32GB系统RAM
硬盘:20GB免费硬盘空间 - SSD硬盘
视频卡:符合Direct X 9.0c标准具有至少2GB RAM和CUDA功能的NVIDIA显卡> = 3.0
1. 在mvs /网格提取期间提取更好的细节
2. 网格增强滤波器已得到改进,可以提取更多细节
3. 多视图立体声已进一步加速
4. 纹理生成过程中更好的UV打包算法
5. 提高内部分辨率(单个图像分辨率现在可以更大)
6. 我们所有的(3D引擎,数学,GUI)核心库已经更新到最新版本,并修复了一些错误。
7. 为了优化计算,默认情况下将一次计算网格和密集点云。如果需要,仍然可以生成单独的点云。
8. 新的常规预设类别适合大多数情况
9. 纹理生成页面现在具有与其他页面一样的预设
10. 您可以从高多边形网格到任何纹理网格,烘焙法线贴图(对象和切线空间)。
11. 现在,所有工作空间元素都可以按任何顺序上下移动和组织
12. 已重新组织对齐工具对话框以便更好地使用
 22.72MB
22.72MB














 迅雷极速版
迅雷极速版 网易邮箱大师
网易邮箱大师 夜神模拟器
夜神模拟器 搜狗拼音输入法
搜狗拼音输入法 世界之窗浏览器
世界之窗浏览器 网易CC语音
网易CC语音 游侠对战平台
游侠对战平台 UC浏览器
UC浏览器 金山毒霸
金山毒霸 微信电脑版
微信电脑版 360压缩
360压缩 网易云音乐
网易云音乐 有道云笔记
有道云笔记 FastStone Capture
FastStone Capture 格式工厂
格式工厂 万能五笔输入法
万能五笔输入法 微软常用运行库
微软常用运行库 YY语音
YY语音 飞书文档
飞书文档 腾讯视频会议
腾讯视频会议 CPU-Z
CPU-Z 傲梅分区助手
傲梅分区助手 IDM中文版
IDM中文版 DirectX修复工具
DirectX修复工具 360驱动大师
360驱动大师 Snipaste
Snipaste 360壁纸
360壁纸 口袋动画PPT插件
口袋动画PPT插件 WPS Office
WPS Office 金山PDF阅读器
金山PDF阅读器 360手机助手
360手机助手 Root精灵
Root精灵 iTunes
iTunes 同步助手
同步助手 奇兔刷机
奇兔刷机 飞火动态壁纸
飞火动态壁纸 腾讯桌面整理
腾讯桌面整理 酷点桌面美化
酷点桌面美化 搜狗壁纸
搜狗壁纸 雨滴桌面秀
雨滴桌面秀 百度拼音输入法
百度拼音输入法 搜狗拼音输入法
搜狗拼音输入法 手心拼音输入法
手心拼音输入法 QQ拼音输入法
QQ拼音输入法 微软拼音输入法
微软拼音输入法 BandiZip
BandiZip 精灵虚拟光驱
精灵虚拟光驱 PowerISO
PowerISO 7-Zip
7-Zip 智图压缩
智图压缩 DiskGenius
DiskGenius SSD Fresh
SSD Fresh 万能低格工具
万能低格工具 安易数据恢复
安易数据恢复 CrystalDiskInfo
CrystalDiskInfo 下图高手
下图高手 可牛影像
可牛影像 Xnview
Xnview 图片去水印工具
图片去水印工具 2345看图王
2345看图王